В В В В В з»Ҷеҝғзҡ„жңӢеҸӢиӮҜе®ҡе·Із»ҸеҸ‘зҺ°KinectдёҠй•ҝдәҶдёүеҸӘзңјзқӣпјҢе…¶дёӯдёҖдёӘжҳҜеҪ©иүІж‘„еғҸеӨҙпјҢеҸҰеӨ–дёӨдёӘж·ұеәҰж‘„еғҸеӨҙпјҢдёҖдёӘиҙҹиҙЈеҸ‘е°„зәўеӨ–е…үпјҢдёҖдёӘиҙҹиҙЈжҺҘ收пјҢиҝҷж ·пјҢжҲ‘们дҫҝиғҪйҖҡиҝҮKinectеҫ—еҲ°дёҖе№…еҪ©иүІеӣҫеғҸе’ҢдёҖе№…ж·ұеәҰеӣҫеғҸгҖӮеҰӮжһңеӨ§е®¶еҜ№Kniectзңјзқӣзҡ„жҠҖжңҜз»ҶиҠӮж„ҹе…ҙи¶ЈпјҢиҜ·зӮ№еҮ»иҝҷйҮҢ
гҖӮ
В В В В В
е°Ҹж–Өзҡ„第дёҖдёӘиҢғдҫӢпјҢдҫҝжҳҜйҖҡиҝҮOpenNIеҫ—еҲ°еҪ©иүІе’Ңж·ұеәҰеӣҫеғҸе’ҜпјҢд»Јз ҒдёҚй•ҝпјҢе…¶дёӯдёҖйғЁеҲҶеҸӮиҖғдәҶHereskyз«ҘйһӢзҡ„ж–Үз« гҖҠйҖҸйҒҺ
OpneNI еҗҲдҪө Kinect ж·ұеәҰд»ҘеҸҠеҪ©иүІеҪұеғҸиіҮж–ҷгҖӢ
пјҢжӯӨеӨ–пјҢе°Ҹж–ӨиЎҘе……дәҶOpenCVзҡ„жҳҫзӨәйғЁеҲҶпјҢдҪҝиҢғдҫӢжӣҙдёәзӣҙи§ӮгҖӮ
В
#include <stdlib.h>
#include <iostream>
#include <string>
//гҖҗ1гҖ‘
#include <XnCppWrapper.h>
#include "opencv/cv.h"
#include "opencv/highgui.h"
using namespace std;
using namespace cv;
void CheckOpenNIError( XnStatus result, string status )
{
if( result != XN_STATUS_OK )
cerr << status << " Error: " << xnGetStatusString( result ) << endl;
}
int main( int argc, char** argv )
{
XnStatus result = XN_STATUS_OK;
xn::DepthMetaData depthMD;
xn::ImageMetaData imageMD;
//OpenCV
IplImage* imgDepth16u=cvCreateImage(cvSize(640,480),IPL_DEPTH_16U,1);
IplImage* imgRGB8u=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
IplImage* depthShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);
IplImage* imageShow=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);
cvNamedWindow("depth",1);
cvNamedWindow("image",1);
char key=0;
//гҖҗ2гҖ‘
// context
xn::Context context;
result = context.Init();
CheckOpenNIError( result, "initialize context" );
// creategenerator
xn::DepthGenerator depthGenerator;
result = depthGenerator.Create( context );
CheckOpenNIError( result, "Create depth generator" );
xn::ImageGenerator imageGenerator;
result = imageGenerator.Create( context );
CheckOpenNIError( result, "Create image generator" );
//гҖҗ3гҖ‘
//map mode
XnMapOutputMode mapMode;
mapMode.nXRes = 640;
mapMode.nYRes = 480;
mapMode.nFPS = 30;
result = depthGenerator.SetMapOutputMode( mapMode );
result = imageGenerator.SetMapOutputMode( mapMode );
//гҖҗ4гҖ‘
// correct view port
depthGenerator.GetAlternativeViewPointCap().SetViewPoint( imageGenerator );
//гҖҗ5гҖ‘
//read data
result = context.StartGeneratingAll();
//гҖҗ6гҖ‘
result = context.WaitNoneUpdateAll();
while( (key!=27) && !(result = context.WaitNoneUpdateAll( )) )
{
//get meta data
depthGenerator.GetMetaData(depthMD);
imageGenerator.GetMetaData(imageMD);
//гҖҗ7гҖ‘
//OpenCV output
memcpy(imgDepth16u->imageData,depthMD.Data(),640*480*2);
cvConvertScale(imgDepth16u,depthShow,255/4096.0,0);
memcpy(imgRGB8u->imageData,imageMD.Data(),640*480*3);
cvCvtColor(imgRGB8u,imageShow,CV_RGB2BGR);
cvShowImage("depth", depthShow);
cvShowImage("image",imageShow);
key=cvWaitKey(20);
}
//destroy
cvDestroyWindow("depth");
cvDestroyWindow("image");
cvReleaseImage(&imgDepth16u);
cvReleaseImage(&imgRGB8u);
cvReleaseImage(&depthShow);
cvReleaseImage(&imageShow);
context.StopGeneratingAll();
context.Shutdown();
return 0;
}
В
В
В
иҝҷиҫ№е°Ҹж–Өз”ұдёҠеҲ°дёӢи§ЈйҮҠдёҖжҠҠпјҡ
гҖҗ1гҖ‘<XnCppWrapper.h>дҫҝжҳҜOpenNIзҡ„ж–Ү件еӨҙдәҶпјҢдҪҝз”ЁOpenNIзҡ„иҜқпјҢзӣ®еүҚеҸӘиҰҒincludeиҝҷдёӘе°ұиЎҢгҖӮ
гҖҗ2гҖ‘
DepthGeneratorе’ҢImageGeneratorпјҢе°Ҹж–Өз§°д№ӢдёәеӣҫеғҸз”ҹжҲҗеҷЁпјҢеүҚиҖ…иҙҹиҙЈж·ұеәҰеӣҫеғҸпјҢеҗҺиҖ…иҙҹиҙЈеҪ©иүІеӣҫеғҸгҖӮеҲӣе»әдёҖдёӘз”ҹжҲҗеҷЁйқһеёёз®ҖеҚ•пјҢйҰ–
е…ҲжҲ‘们иҰҒеҲқе§ӢеҢ–дёҖдёӘContextдёҠдёӢж–ҮпјҢ然еҗҺжҠҠContextдҪңдёәCreateеҮҪж•°зҡ„еҸӮж•°пјҢдҫҝеҸҜд»ҘеҲӣе»әз”ҹжҲҗеҷЁдәҶгҖӮ
гҖҗ3гҖ‘XnMapOutputModeжҳҜз”ЁжқҘи®ҫе®ҡз”ҹжҲҗеҷЁзҡ„еҸӮж•°зҡ„пјҢиҝҷиҫ№е°Ҹж–Өи®ҫе®ҡдәҶеҲҶиҫЁзҺҮдёә640*480пјҲж ҮеҮҶпјүпјҢ30fpsйҮҮж ·гҖӮ
гҖҗ4гҖ‘
depthGenerator.GetAlternativeViewPointCap().SetViewPoint(
imageGenerator)иҝҷеҸҘиҜқд№ҹи®ёдјҡи®©еӨ§е®¶з–‘жғ‘пјҢе®ғжҳҜз”ЁжқҘи°ғж•ҙи§Ҷи§’зҡ„гҖӮдёәд»Җд№ҲиҰҒи°ғж•ҙе‘ўпјҹеӣ дёәKinectзҡ„дёүеҸӘзңјй•ҝеңЁдёҚеҗҢзҡ„ең°ж–№пјҢжүҖд»Ҙз”»е№…дёҖиҮҙзҡ„
ж·ұеәҰж‘„еғҸеӨҙе’ҢеҪ©иүІж‘„еғҸеӨҙпјҢе®ғ们зңӢеҮәжқҘзҡ„жҷҜзү©жҳҜжңүеҒҸе·®зҡ„пјҢиҝҷйҮҢOpenNIжҸҗдҫӣдәҶеҮҪж•°иҝӣиЎҢеҜ№йҪҗгҖӮиҝҷйҮҢпјҢе°Ҹж–ӨжҠҠж·ұеәҰз”ҹжҲҗеҷЁзҡ„и§Ҷи§’пјҢи®ҫе®ҡдёәеҪ©иүІз”ҹжҲҗеҷЁзҡ„и§Ҷи§’гҖӮ
гҖҗ5гҖ‘и°ғз”ЁStartGeneratingAll()еҗҺпјҢз”ҹжҲҗеҷЁд»¬дҫҝејҖе§ӢдёҠзҸӯдәҶпјҢеҰӮжһңиҰҒз»“жқҹпјҢе°ұStopGeneratingAll()еҮҪж•°гҖӮ
гҖҗ6гҖ‘
е°Ҫз®Ўз”ҹжҲҗеҷЁд»¬еңЁе·ҘдҪңдәҶпјҢдҪҶ他们дёҖзӣҙеҝҷзқҖеҗ„иҜ»еҗ„зҡ„пјҢжІЎжңүдәәеҚҸи°ғпјҢиҮӘе·ұдёҚдјҡд№–д№–жҠҠжңҖж–°зҡ„иө„ж–ҷз»ҷжҲ‘们гҖӮжҲ‘们и°ғз”ЁgetMetaData()ж–№жі•еүҚпјҢйңҖиҰҒдҪҝз”Ё
WaitAnyUpdateAll()гҖҒWaitOneUpdateAll()гҖҒWaitNoneUpdateAll()е’Ң
WiatAndUpdateAll()дёӯзҡ„дёҖз§ҚгҖӮеҠҹиғҪеҰӮе…¶еҗҚпјҢиҝҷиҫ№е°Ҹж–ӨдҪҝз”Ёзҡ„жҳҜWaitNoneUpdateAll()еҮҪж•°пјҢе®ғжҜ”иҫғжҡҙеҠӣпјҢдёҚз®Ўз”ҹжҲҗеҷЁжңүжІЎ
жңүиҜ»еҲ°ж–°ж•°жҚ®пјҢжҲ‘иҝҷиҫ№е…Ҳжӣҙж–°дәҶеҶҚиҜҙгҖӮеӨ§е®¶еҸҜд»ҘиҜ•иҜ•е…¶е®ғдёүдёӘпјҢзңӢзңӢж•ҲжһңгҖӮ
гҖҗ7гҖ‘иҝҷиҫ№дҪҝз”ЁOpenNIиҺ·еҫ—еӣҫеғҸMetaDataж•°жҚ®еҗҺпјҢе°Ҹж–ӨйҖҡиҝҮдёҖзі»еҲ—еҮҪж•°пјҢиҪ¬жҚўдёәOpenCVзҡ„IplImageеӣҫеғҸзұ»еһӢпјҢ然еҗҺиҫ“еҮәгҖӮдё»иҰҒеҸӮиҖғдәҶиҝҷзҜҮж–Үз«
гҖӮ
В В В В В В В
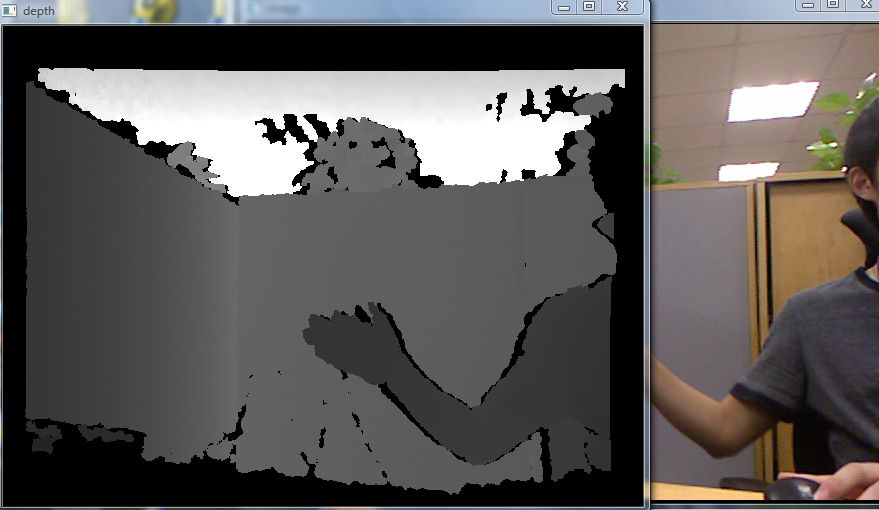
еҜ№дәҺж·ұеәҰMetaDataпјҢиҝҷиҫ№дҪҝз”ЁcvConvertScaleиҪ¬жҚўе°әеәҰпјҢжҲҗдёәзҒ°еәҰеҖј[0,255]зҡ„зҒ°еәҰеӣҫгҖӮеҜ№дәҺеҪ©иүІMetaDataпјҢдҪҝз”ЁcvCvtColorиҪ¬жҚўиүІеҪ©з©әй—ҙеҚіеҸҜгҖӮжҢүESCй”®еҸҜд»ҘйҖҖеҮәеҫӘзҺҜпјҢз»“жқҹзЁӢеәҸгҖӮ
В В В В В В В жңҖз»Ҳж•ҲжһңеҰӮдёӢпјҡ
В
В В В В В еңЁзҒ°еәҰеӣҫдёӯзҒ°еәҰеҖј0жҳҫзӨәдёәй»‘иүІпјҢ255дёәзҷҪиүІпјҢжүҖд»ҘпјҢзҰ»Kinectиҝ‘зҡ„ең°ж–№пјҲжЎҢйқўпјүжҳҫзӨәдёәй»‘иүІпјҢдёӯй—ҙдёәдёҚеҗҢзЁӢеәҰзҡ„зҒ°иүІпјҢиҝңеӨ„пјҲеӨ©иҠұжқҝпјүжҳҫзӨәдёәзҷҪиүІгҖӮ
В
----------------------------------
дҪңиҖ…пјҡе°Ҹж–ӨпјҲйҷҲеҝ»пјү
жң¬ж–ҮеұһдәҺеҺҹеҲӣж–Үз« пјҢеҰӮйңҖиҪ¬иҪҪеј•з”ЁиҜ·жіЁжҳҺеҺҹж–ҮдҪңиҖ…е’Ңй“ҫжҺҘпјҢи°ўи°ўгҖӮ
еҲҶдә«еҲ°пјҡ




зӣёе…іжҺЁиҚҗ
зҪ‘дёҠжңүдёҚе°‘дҪҝз”ЁQtеҒҡз•ҢйқўпјҢOpenNIдёәеә“жқҘејҖеҸ‘kinectгҖӮжҲ–и®ёеӨ§е®¶зҡ„第дёҖдёӘй—®йўҳе°ұжҳҜиҜўй—®иҜҘжҖҺж ·дҪҝз”ЁKinectжқҘиҺ·еҸ–йўңиүІдҝЎжҒҜеӣҫе’Ңж·ұеәҰдҝЎжҒҜеӣҫе‘ўпјҹиҝҷдёҖиҠӮе°ұжҳҜз®ҖеҚ•жқҘеӣһзӯ”иҝҷдёӘй—®йўҳзҡ„гҖӮ дҪҝз”ЁOpenNIиҜ»еҸ–йўңиүІеӣҫе’Ңж·ұеәҰеӣҫзҡ„жӯҘйӘӨеҰӮдёӢпјҲиҝҷ...
иҜ»еҸ–并жҳҫзӨәkinectеҪ©иүІе’Ңж·ұеәҰдҝЎжҒҜзҡ„дёүз§Қж–№ејҸгҖӮ 1.KinectSDK+MFC ж–№жі•жҳҜпјҡеҲ©з”ЁKinectSDKиҜ»еҮәеҪ©иүІеӣҫе’Ңж·ұеәҰеӣҫпјҢеҲ©з”ЁMFCзӘ—жҳҫзӨә 2.KinectSDK+OpenCV ж–№жі•жҳҜпјҡеҲ©з”ЁKinectSDKиҜ»еҮәеҪ©иүІеӣҫе’Ңж·ұеәҰеӣҫпјҢеҲ©з”ЁopenCVжҳҫзӨә 3.OpenNIе’Ң...
kinect-v2дҝ®еӨҚж·ұеәҰеӣҫеғҸ并用дҝ®еӨҚеҗҺеӣҫеғҸиҝӣиЎҢеҪ©иүІж·ұеәҰй…ҚеҮҶ并пјҢз”ЁopencvжҳҫзӨәй…ҚеҮҶз»“жһңпјҢ并иҺ·еҸ–еңәжҷҜдёӯжүҖжңүзӮ№зҡ„дёүз»ҙеқҗж ҮпјҢз”ЁopenglжҳҫзӨәдёүз»ҙеңәжҷҜ
еҗҢж—¶йҮҮйӣҶKinectзҡ„ж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸпјҢ并且еҸҜе®һж—¶е°ҶеҗҢдёҖж—¶еҲ»йҮҮйӣҶзҡ„дёӨз§ҚеӣҫеғҸдҝқеӯҳеҲ°зӣёеә”зӣ®еҪ•гҖӮ
иҜҰз»Ҷи®Іиҝ°дәҶеҰӮдҪ•з”ЁOpenNIиҜ»еҸ–еӨҡдёӘKinectж•°жҚ®пјҢ并且еҸҜд»ҘжөӢиҜ•дёҖеҸ°PCжңҖеӨҡеҸҜд»ҘиҝһжҺҘеӨҡе°‘дёӘKinect
е°ҶkinectиҺ·еҸ–зҡ„еҪ©иүІеӣҫеғҸжҳ е°„еҲ°ж·ұеәҰеқҗж ҮдёӢпјҢз”ЁOpenCVжҳҫзӨәеҪ©иүІеӣҫеғҸд»ҘеҸҠж·ұеәҰеӣҫеғҸ并жҳҫзӨәз»“жһңгҖӮ并жҜ”иҫғдәҶдёӨз§Қй…ҚеҮҶж–№жі•пјҢдёҖз§Қдёәз®ҖеҚ•еӣҫеғҸеҸҳжҚўпјҢдёҖз§ҚжҳҜж·ұеәҰеҪ©иүІд№Ӣй—ҙеқҗж ҮеҸҳжҚўгҖӮ
иҜ»еҸ–并жҳҫзӨәkinectеҪ©иүІе’Ңж·ұеәҰдҝЎжҒҜзҡ„дёүз§Қж–№ејҸпјҡд»Јз ҒиҜ»еҸ–并жҳҫзӨәkinectеҪ©иүІе’Ңж·ұеәҰдҝЎжҒҜзҡ„дёүз§Қж–№ејҸпјҡд»Јз ҒиҜ»еҸ–并жҳҫзӨәkinectеҪ©иүІе’Ңж·ұеәҰдҝЎжҒҜзҡ„дёүз§Қж–№ејҸпјҡд»Јз Ғ
з«ҷеңЁеүҚдәәзҡ„иӮ©иҶҖдёҠеҲӣе»әзҡ„йЎ№зӣ®пјҢеҹәдәҺvisual studio2008
Unityз»“еҗҲKinect2дҪ“ж„ҹејҖеҸ‘пјҡKinectForWindows_UnityPro
жң¬ж–ҮжҳҜж•ҙзҗҶдёӯзҡ„Kinect for Windows v2 зҡ„C++ зЁӢејҸејҖеҸ‘ж•ҷзЁӢгҖӮеҶ…е®№еҢ…жӢ¬дҪҶдёҚйҷҗдәҺпјҡ вҖў Kinect for Windows SDK v2 еҹәжң¬д»Ӣз»Қ вҖў Kinect for Windows SDK v2 C++ API з®Җд»Ӣ вҖў K4W v2 C++ Part 1пјҡз®ҖеҚ•зҡ„ж·ұеәҰиҜ»еҸ–ж–№жі• вҖў ...
Kinect+OpenNIеӯҰд№ з¬”и®°пјҢзі»з»ҹзҡ„д»Ӣз»ҚдәҶпјҢеҰӮдҪ•еңЁOpenNiдёӢдҪҝз”ЁKinectпјҢеҜ№дәҺеҹәдәҺKinectзҡ„ејҖеҸ‘пјҢеҫҲжңүеё®еҠ©пјҢиғҪеӨҹеё®еҠ©е…Ҙй—ЁиҖ…еӯҰдјҡеҰӮдҪ•дҪҝз”ЁKinectпјҢеҜ№дәҺд»ҘеҗҺдҪҝз”Ёе…¶д»–е№іеҸ°ејҖеҸ‘пјҢд№ҹжҳҜеӨ§жңүиЈЁзӣҠзҡ„гҖӮ
kinect matlabж ЎжӯЈи®әж–Ү еҸҜд»ҘеҗҢж—¶ж ЎжӯЈж·ұеәҰе’ҢжӯЈеҪ©иүІеӣҫеғҸ 并且еҸҜд»Ҙж ЎжӯЈж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸд№Ӣй—ҙзҡ„еҒҸе·®
дёәи§ЈеҶідј з»ҹзҡ„дҪҝз”Ёи§Ҷйў‘еҪ©иүІеӣҫеғҸеәҸеҲ—зҡ„жҷәиғҪзӣ‘жҺ§е®№жҳ“еҸ—е…үз…§гҖҒйўңиүІзӯүеӣ зҙ еҪұе“Қзҡ„й—®йўҳ,жҸҗеҮәз»“еҗҲKinectж·ұеәҰеӣҫеғҸе’Ңж”ҜжҢҒеҗ‘йҮҸжңәзҡ„дәәдҪ“еҠЁдҪңиҜҶеҲ«ж–№жі•.еҲ©з”ЁKinectеңЁзӣ‘жҺ§еҢәеҹҹиҺ·еҫ—е®һж—¶ж·ұеәҰеӣҫеғҸ,并иҝӣиЎҢиғҢжҷҜж“ҰйҷӨ,ж»ӨжіўеӨ„зҗҶе’ҢжҸҗеҸ–Haar...
еҲ©з”ЁkinectжҳҫзӨәж·ұеәҰеӣҫеғҸдҝЎжҒҜпјҢйҖӮеҗҲз ”з©¶kinectеҲқеӯҰиҖ…пјҢдҪҝз”ЁVC2008е’ҢopenCV2.3е®һзҺ°гҖӮ
kinectйҖҡиҝҮopencvеә“win7зі»з»ҹжҳҫзӨәеҪ©иүІеӣҫеғҸпјҢе®һж—¶жҳҫзӨәеҪ©иүІеӣҫеғҸеҸҜд»ҘеҜ№еҪ©иүІеӣҫеғҸиҝӣиЎҢеҲҶжһҗпјҢе’ҢиҪ®е»“зҡ„иҫ№зјҳжЈҖжөӢпјҢйҖӮеҗҲеҲқеӯҰиҖ…
kinectV2иҺ·еҸ–ж·ұеәҰеӣҫеғҸе’ҢеҪ©иүІеӣҫеғҸпјҢд»Јз ҒзңӢиө·жқҘйҖҡдҝ—жҳ“жҮӮпјҢ